
計測・検査・センシングに関連する気になるカタログにチェックを入れると、まとめてダウンロードいただけます。
ロボットの精密動作設計とは?課題と対策・製品を解説

目的・課題で絞り込む
品質管理・検査工程
生産工程・プロセス
カテゴリで絞り込む
カメラ・顕微鏡 |
センサ |
計測機器 |
計量機器 |
検査機器 |
試験��機器 |
測定要素技術 |
測定製品・サービス |
その他計測・検査・センシング |

研究開発・試作におけるロボットの精密動作設計とは?
各社の製品
絞り込み条件:
▼チェックした製品のカタログをダウンロード
一度にダウンロードできるカタログは20件までです。
【研究開発向け】天井取付用 昇降式モニターアーム

【研究機関向け】SSA 単軸リニアモーターステージ

研究向け/Mill-Key Pro 5040

【研究開発向け】HIWIN 単軸ロボット KHシリーズ

【精密測定向け】ACS-13.5-5 エアベアリングシリンダ
【研究機関向け】LTC6050 超精密ファイバーレーザー加工機

【研究開発向�け】HIWIN 直交ロボット KKシリーズ

【研究開発向け】垂直多関節ロボット

【研究開発向け】HIWIN 単軸ロボット

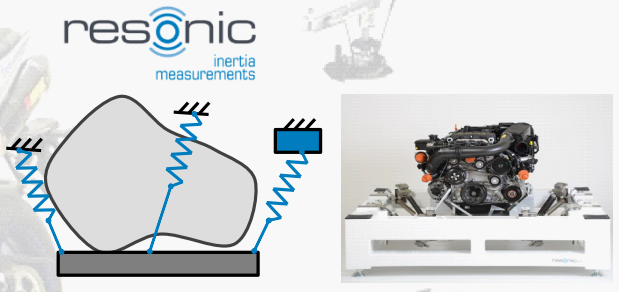
剛体特性計測技術の最先端「レゾニック計測技術」
Artec Eva

Piezo stage ピエゾステージ
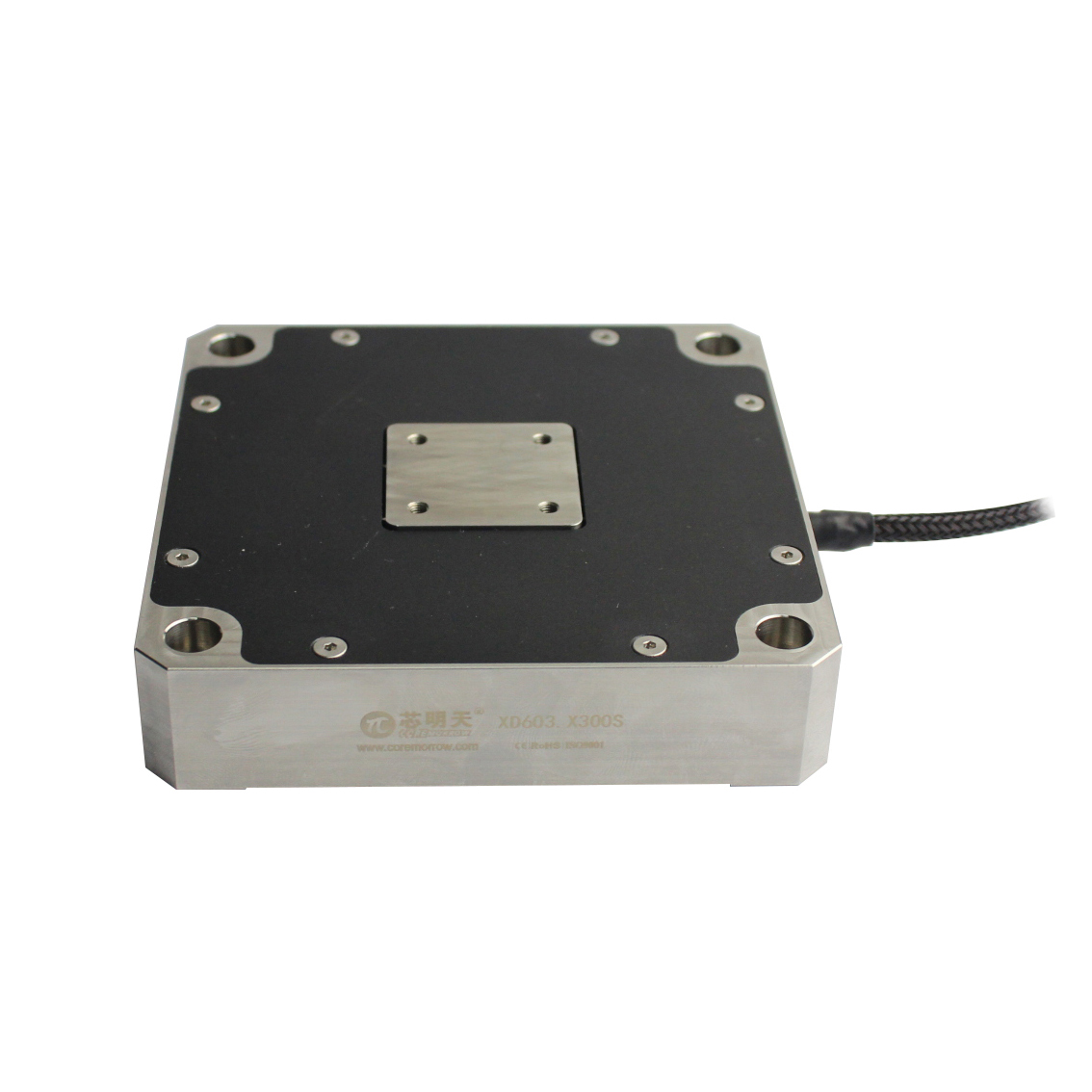
フォースプレート

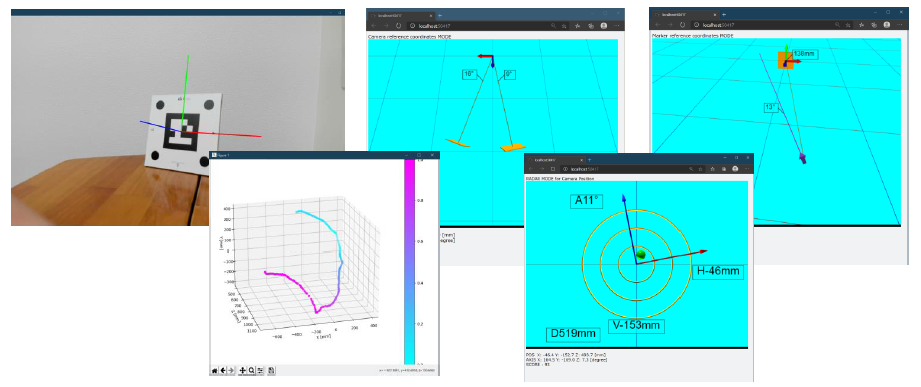
簡易プログラミングツールセット『LEAG-CAM』
フォースプレート『TF-4060L』

力覚センサ『USL06-H5』
圧力分布型触覚センサー『EWセンサー』


お探しの製品は見つかりませんでした。
1 / 1
研究開発・試作におけるロボットの精密動作設計
研究開発・試作におけるロボットの精密動作設計とは?
計測・検査・センシング業界における研究開発・試作段階で用いられるロボットの、極めて高い精度が求められる動作を設計すること。微細な対象物の把持、高精度な位置決め、非接触での計測などを実現し、製品開発の効率化と品質向上を目指す。
課題
微細・非接触操作の難しさ
マイクロメートル以下の精度での対象物操作や、非接触での精密な計測・検査が求められる場合、ロボットアームの微細な振動や位置ずれが致命的なエラーに繋がる。
多様な形状・材質への対応
研究開発では、様々な形状、材質、物性を持つ対象物を扱う必要があり、汎用的なグリッパーやセンサーでは対応が難しく、都度カスタマイズが必要となる。
リアルタイムでのフィードバック制御
高速かつ高精度な動作を実現するためには、センサーからの情報をリアルタイムで解析し、ロボットの動作を即座に補正する高度なフィードバック制御システムが不可欠である。
シミュレーションと実機との乖離
設計段階でのシミュレーション結果と、実際の試作環境での動作に乖離が生じやすく、試行錯誤に多くの時間とコストがかかる。
対策
高精度アクチュエータと制御
高分解能・高剛性なアクチュエータと、高度な運動学・動力学に基づいた精密な軌道計画・制御アルゴリズムを導入する。
アダプティブグリッピング機構
対象物の形状や材質に合わせて把持力を自動調整する、あるいは多様な形状に対応できるモジュール式のグリッパーシステムを開発・採用する。
統合型センサーフュージョン
画像センサー、力覚センサー、距離センサーなどを統合し、得られた情報をリアルタイムで融合・解析することで、高精度な環境認識と動作補正を実現する。
高 fidelity シミュレーション環境
物理演算エンジンやリアルタイムレンダリング技術を活用し、実機に近い環境での動作検証を可能にする高精度なシミュレーション環境を構築する。
対策に役立つ製品例
高精度小型ロボットアーム
マイクロメートルオーダーの繰り返し位置決め精度と、低振動設計により、微細な対象物の精密な操作を実現する。
多機能センサーモジュール
高解像度カメラ、触覚センサー、レーザー変位計などを組み合わせ、対象物の形状、材質、位置を正確に把握し、リアルタイムで制御にフィードバックする。
AI駆動型動作計画ソフトウェア
学習データに基づき、複雑なタスクに対して最適な動作経路を自動生成し、シミュレーションと実機での乖離を最小限に抑える。
モジュラー式グリッパーシステム
様々な形状や材質の対象物に対応できる、交換可能なグリッパーヘッドと、対象物を傷つけずに確実に把持する機構を備えている。
⭐今週のピックアップ
読み込み中
