
計測・検査・センシングに関連する気になるカタログにチェックを入れると、まとめてダウンロードいただけます。
協調ロボットの動作精度向上とは?課題と対策・製品を解説

目的・課題で絞り込む
品質管理・検査工程
生産工程・プロセス
カテゴリで絞り込む
カメラ・顕微鏡 |
センサ |
計測機器 |
計量機器 |
検査機器 |
試験機器 |
測定要素技術 |
測定製品・サービス |
その他計測・検査・センシング |

生産工程・プロセスにおける協調ロボットの動作精度向上とは?
各社の製品
絞り込み条件:
▼チェックした製品のカタログをダウンロード
一度にダウンロードできるカタログは20件までです。
【ロボティクス向け】MXO3オシロスコープ

【ロボット向け】シャフト外観検査装置|キズ・打痕検出対応
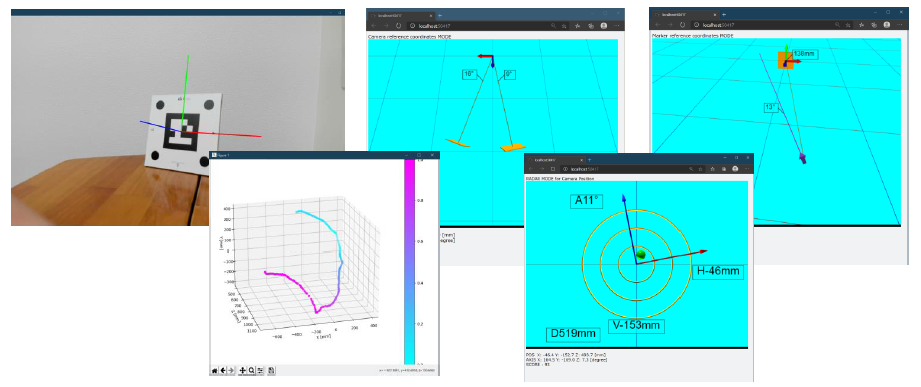
高精度マーカ
エンコーダ『インクリメンタル・フォトエンコーダ』

6軸力覚センサ【6成分をひずみゲージで検出し信号に変換!】
簡易プログラミングツールセット『LEAG-CAM』
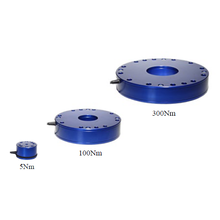
静電容量型トルクセンサ『ESTORQ』
小型センサ 2-D平面位置センサ
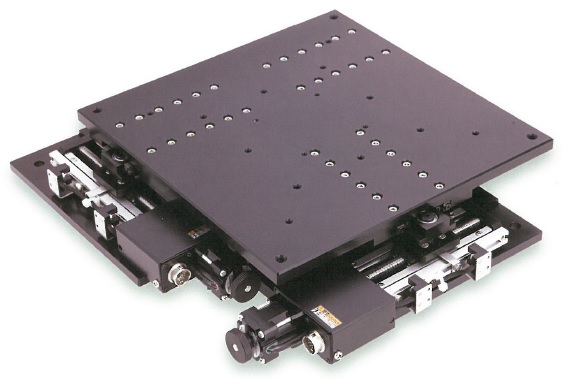
PIG 3軸アライメントテーブル「PIG3-220」
圧力分布型触覚センサー『EWセンサー』


お探しの製品は見つかりませんでした。
1 / 1
生産工程・プロセスにおける協調ロボットの動作精度向上
生産工程・プロセスにおける協調ロボットの動作精度向上とは?
計測・検査・センシング業界において、協調ロボットが人間の作業者と連携しながら、より高精度な作業を遂行できるようにすることを目指します。これにより、生産性の向上、品質の安定化、そしてヒューマンエラーの削減を実現します。
課題
環境変化への対応不足
生産ラインの照明、温度、振動などの環境変化が、ロボットのセンサー認識や動作に影響を与え、精度が低下する。
対象物のばらつき
搬送される部品や製品の形状、位置、姿勢にばらつきがあり、ロボットが正確に把持・操作できない。
リアルタイム補正の遅延
作業中に発生する予期せぬずれや干渉を�、リアルタイムで検知し、動作を補正する仕組みが不十分である。
ティーチング精度の限界
初期設定(ティーチング)の精度が低い場合や、作業内容の変更時に再ティーチングの手間がかかり、精度維持が難しい。
対策
高精度センサーによる環境認識
高解像度カメラや3Dセンサーなどを活用し、変化する環境下でも対象物を正確に認識・位置特定する。
適応型把持・操作制御
対象物のばらつきに対応できるよう、力覚センサーや画像認識を用いて、柔軟な把持力や操作軌道を自動調整する。
リアルタイムフィードバックシステム
作業中のずれを即座に検知し、ロボットの動作軌道をリアルタイムで補正する閉ループ制御システムを導入する。
AIを活用した自動ティーチング
AIが過去の作業データやシミュレーション結果から最適な動作軌道を学習し、自動でティーチングを行うことで精度と効率を向上させる。
対策に役立つ製品例
高解像度ビジョンシステム
微細な特徴や位置ずれも高精度に捉え、ロボットの正確な動作指示を可能にする。
力覚フィードバックセンサー
対象物への接触力を検知し、過度な力を加えずに繊細な操作を実現することで、破損を防ぎ精度を高める。
リアルタイム位置補正ソフトウェア
作業中の予期せぬずれを即座に検知し、ロボットの軌道を動的に修正することで、常に最適な位置で作業を行う。
AI駆動型学習システム
過去の作業データを分析し、最適な動作パターンを学習・生成することで、ティーチング作業の精度と効率を劇的に向上させる。
⭐今週のピックアップ
読み込み中
